了解自動化倉儲,首先需要先了解其中扮演至關重要的角色的AGV

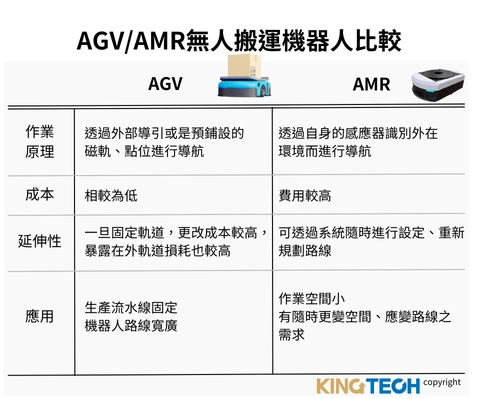
AGV(自動導引車)是一種無人搬運車,通常需要在地面鋪設磁軌或色帶來引導其移動。這些AGVs只能在預先設定的路徑上行駛,並需要特定的標記來執行停車、加減速和轉彎等操作。
然而,這種固定路徑的設計限制了AGVs在不同環境下的應用彈性,並增加了維護成本。隨著工業4.0時代的到來,生產線需要更具靈活性和自動化程度,以應對客製化需求和提高效率。
傳統的AGVs在大型製造公司中可能仍然有用武之地,例如半導體廠或面板廠等。但是,在一般工廠或商業場所中,由於架設成本高昂、使用限制以及技術支援需求等問題,AGVs的應用受到了限制。
由此可見,在未來發展中,我們需要更具靈活性和智能化的無人搬運車技術,以滿足不斷變化的生產需求和提高效率。透過創新技術和系統設計,我們可以期待看到更多智能化、靈活性強且易於部署的無人搬運車出現在各種工業場景中。
因此,AMR的需求也在目前趨勢中慢慢油然而生
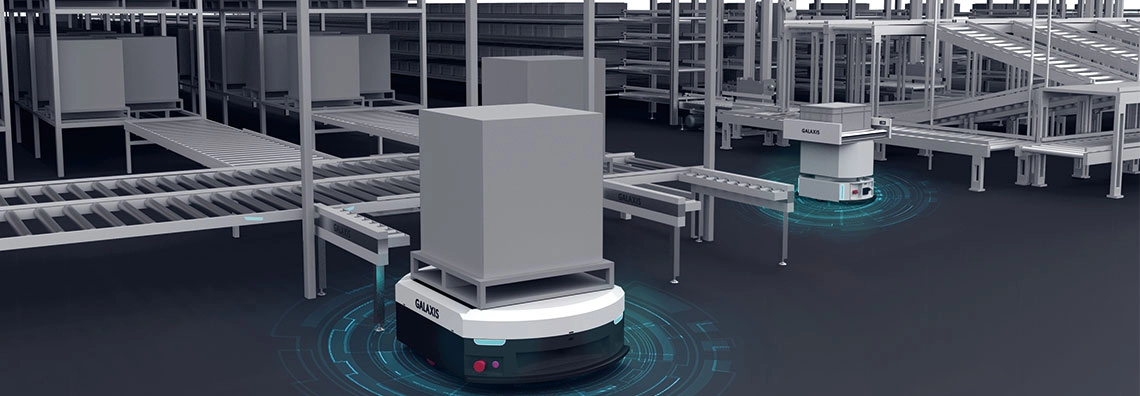
近年來,許多國際大廠紛紛投入研發無軌道自主移動機器人(AMRs),這些AMRs(Autonomous Mobile Robots)具有快速導入、易於操作和相對較低成本的優勢。由於它們不需要依賴固定軌道,因此除了在工廠中使用外,同樣適用於商業場所、農業領域等各種場合。
目前的AMRs主要採用光學雷達(LIDAR)技術來進行定位,透過測量周圍物體的輪廓,建立工作區域地圖並規劃路徑。相較於傳統的磁軌AGVs系統,光學雷達技術消除了導入和維護上的困難,實現了無需固定軌道的目標。然而,由於在長距離走廊等場合需要使用射程更遠的雷射(超過30米),這些高價值的光學雷達設備售價昂貴(約20萬至40萬元之間),再加上SL AM 軟體開發成本,使得整體機器人價格居高不下。
雖然光學雷達技術解決了磁軌AGVs系統的問題並實現了無需固定軌道的目標,但由於其使用雷射作為光源,在特定物理特性上存在一些限制。例如,雷射光會穿透玻璃、金屬表面會強力反射、某些物體可能完全吸收雷射光等情況,在特定場合可能會造成定位失效而迷航的問題。
以下整理目前市場上的幾種導航方式:
| 分類 | 訊息來源 | 線路形式 | ||
| 方式 | 外導式 | 內導式 | 有軌道 | 無軌道 |
| 方法 | 電磁導引 超聲波導引 雷射導引 視覺導引 標線導引 | 慣性導引 | 電磁線路 磁帶線路 色帶線路 二維條碼格狀 | 超聲波導引 雷射導引 視覺導引 慣性導引 微波導引 |
常見無人搬運車導航方法整理:
| 優點 | 缺點 | |
| 電磁導航 |
|
|
| 磁帶導航 |
|
|
| 二維碼導航 |
|
|
| 雷射導航 |
|
|
| 視覺導航 |
|
|